Voando novas rotas submarinas

De Stock: Intervenção do fundo do mar do modo

De Stock: Intervenção do fundo do mar do modo

De Stock: Intervenção do fundo do mar do modo
A Modus Seabed Intervention Limited, com sede no Nordeste da Inglaterra, é uma empresa relativamente pequena, mas seus objetivos são ambiciosos e focados. Elaine Maslin relata.
Após quatro anos dedicados ao desenvolvimento de um AUV / ROV híbrido (HAUV) baseado em um sistema Saab Sabertooth AUV modificado, a Modus Seabed Intervention já comprou seu segundo Sabertooth, que será entregue neste verão.
A aquisição de sua mais recente Sabertooth, com capacidade para 3.000m, permitirá que a empresa continue a construir seu histórico e ofereça veículos com inteligência artificial aprimorada e capacidades de autonomia.
A visão da empresa é que os seus HAUVs operem em campo em locais offshore de petróleo e gás e renováveis, incluindo parques eólicos, independentemente de navios de serviço. Isso pode ser feito por meio de um sistema de implantação de superfície ou por meio de uma garagem / estação de ancoragem submarina, na qual o veículo pode "voar" para dentro e para fora. A partir das instalações de acoplamento, o veículo pode operar como um AUV (sem cabo), usando baterias de bordo ou, onde é necessário controle direto, ele pode operar como um ROV por meio de uma corda de fibra ótica (que possibilita excursões muito longas) ou por meio de um umbilical de potência e controle total.
Em vez de ser implantada em uma embarcação de suporte dedicada, a estação de encaixe foi projetada para ser implantada no leito do mar a partir de um guindaste de embarcação. O objetivo é usar uma embarcação já engajada em um local específico, como uma embarcação de suprimento, DSV ou embarcação de serviço de energias renováveis offshore. O HAUV pode então realizar inspeção e / ou levantamento de forma independente, em sinergia com a atividade primária da embarcação, reduzindo custos. O HAUV retornará ao seu terminal na conclusão do escopo do trabalho e aguardará a recuperação em um horário conveniente. “Por exemplo, se você contratou uma embarcação para executar uma operação de suprimento de plataforma, você pode deixar o HAUV no caminho de saída e depois pegá-lo no caminho de volta depois de completar sua tarefa predeterminada”, diz Nigel Ward, Modus. 'chefe comercial oficial. Com base na capacidade da bateria do HAUV atual do Modus, as pesquisas cobrindo cerca de 60 km podem ser executadas com uma única carga autônoma, com o tempo de pesquisa dependendo da velocidade e da carga útil.
O background do Modus é em serviços submarinos de valetamento. Quando a empresa estava procurando investir em novas tecnologias, achava que o mercado de ROV estava maduro, se não saturado, então a Modus procurou diversificar e adquirir um AUV Remus com vistas a fornecer serviços de inspeção e inspeção de menor custo a partir de embarcações que já fora trabalhando. A intenção era pegar carona nas embarcações e deixar o Remus sair e fazer seu trabalho enquanto o navio continuava com sua tarefa principal (em vez de um ROV sendo usado, atar um navio de apoio ao ROV. Os benefícios eram vistos como um erro humano redutor. tornando os projetos offshore mais fáceis, mantendo pessoal qualificado em terra e reduzindo custos e aumentando a segurança.
O Remus não era o veículo certo para as atividades em que o Modus estava envolvido. Ele vinha com um sonar de varredura lateral, mas os clientes queriam batimetria e, como muitos sistemas de AUV, era difícil atualizar o veículo ou trocar sensores para diferentes aplicações ”, diz Ward. “De qualquer forma, os AUVs existentes no mercado não são realmente autônomos, muitas vezes a embarcação precisa rastrear o veículo durante um escopo, o que, aos nossos olhos, derrotou o objeto do recurso autônomo.”
 De Stock: Intervenção do fundo do mar do modo
De Stock: Intervenção do fundo do mar do modo
Então, Modus olhou para Sabertooth de Saab Seaeye. “É um cruzamento entre um ROV e um AUV. Queríamos os benefícios de ambos. A capacidade de montar uma carga útil de sensor de pesquisa flexível de maneira rápida e fácil é essencial para atender aos requisitos do cliente. Podemos contratar um sensor, integrá-lo e você vai embora.
Há tanta nova tecnologia de pesquisa sendo desenvolvida no momento, então queríamos ter certeza de que poderíamos usá-la para comprovar o futuro do veículo.
“Também queríamos ser capazes de pairar como um ROV, ter a velocidade de um AUV e sermos capazes de realizar operações verdadeiramente autônomas, para que você não precise dedicar um navio para perseguir o HAUV com um sistema de posicionamento de linha de base ultracurto. . Sentimos que a Saab Sabertooth atende a esse critério.
“O veículo confia, em seu pacote básico, em seu IXBlue Phins3 INS e RDI workhorse DVL, com aquisição de dados, navegação e processamento de dados de sensores gerenciados pelo QINsy, que também recebe dados da Novatel DGPS. No entanto, a carga útil é flexível e também pode funcionar em matrizes de linha de base longa (LBL) ou com um sistema USBL quando necessário, com um Sonardyne AvTrak 6, fornecendo um transdutor, transceptor e link de telemetria em um ”, diz Ward.
Em 2017, a empresa realizou demonstrações e testes e o HAUV estava pronto para operações comerciais em 2018. Em um dos projetos experimentais em 2017, o HAUV foi lançado de um cais em um lago perto da Facilidade da Saab na Suécia para realizar um corte a pesquisa pré-programada em estilo gramado, que coleta dados de MBES, SSS e SBP em uma rota de aproximadamente 15 km, sem auxílio externo de uma embarcação de apoio (apenas o DGPS, o INS e o DVL do veículo). "Tendo saído e repetido a pesquisa, viu muito pouco desvio", diz Ward. O veículo também foi testado com sucesso várias vezes, ancorando autonomamente em sua garagem submarina. No início de 2018, esta função foi desenvolvida, como parte de um projeto financiado pela Innovate UK para inspeção residente de parques eólicos realizado. Este teste foi realizado na instalação ORE Catapult em Blyth e também envolveu acoplamento de energia indireta e transferência de dados usando um conector indutivo Blue Logic.
Na fase final deste projeto de demonstração financiado, ainda este ano, entre seus compromissos comerciais, a empresa testará um conceito de AUV híbrido residente em um parque eólico offshore no Reino Unido. O HAUV e sua estação de ancoragem serão deixados para uma missão, semelhante a uma demonstração na instalação ORE em Blyth. Nesta ocasião, não fará interface com nenhuma das infraestruturas do parque eólico. “No entanto, para ligar a estação de ancoragem em um parque eólico, o acesso à energia e às comunicações seria relativamente simples”, diz Ward, “já que já existe energia disponível e infraestrutura de dados usada para trabalhar nas turbinas que podemos usar”.
 De Stock: Intervenção do fundo do mar do modo
De Stock: Intervenção do fundo do mar do modo
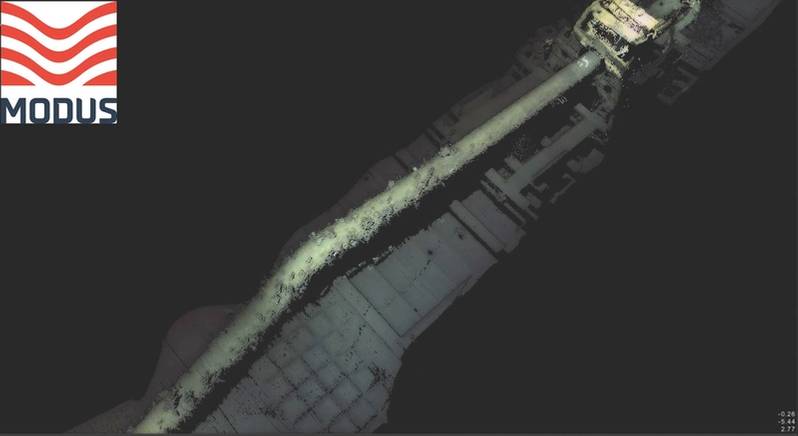
No ano passado, a Modus implementou um HAUV offshore NW Austrália para realizar cerca de 240 km de pesquisa de integridade de oleoduto, produzindo imagens impressionantes, bem como dados de nuvem de pontos, tanto do oleoduto quanto da vida marinha (veja detalhes dos dentes do tubarão). 2knts) usando um perfil de laser da Cathx Scout e imagens de HD espalhadas ao lado de uma sonda multifeixe (MBES).
O tempo da pesquisa foi metade do que teria sido feito usando um ROV tradicional para realizar a pesquisa e poderia ter sido mais rápido ”, diz Ward. "Essa pesquisa é possível sem uma corda, mas foi realizada com uma corda nesta ocasião, para que os dados em tempo real pudessem ser coletados."
Para navegação, o veículo utilizou USBL auxiliando a seguir uma lista de posição de rota a partir de gráficos construídos do pipeline. Isso pode ser combinado com o algoritmo de rastreamento de tubulação autônomo que usa dados de perfil de tubulação coletados para o MBES seguir a rota de tubulação. Isso é particularmente útil se a posição do as-built não for precisa, o que pode ser causado pela imprecisão causada pelas tolerâncias de posicionamento. “Por causa desses sistemas, o AUV pode, na verdade, ver o encanamento, o que significa que o auxílio de USBL nem sempre é necessário para realizar uma inspeção de tubulação, permitindo operações autônomas longe de embarcações de suporte”, diz Ward. “O sistema CathX Laser fornece uma nuvem de pontos de alta resolução do oleoduto e do leito marinho adjacente. As nuvens de pontos Laser e MBES foram combinadas no pós-processamento e usadas para avaliar a posição e possíveis freespans. A resolução muito alta obtida a partir do sistema de laser o torna adequado para deflexão de bobina e outras pesquisas de metrologia baseadas em fotogrametria. ”
Como o veículo é estável, silencioso e pode voar a uma altura constante acima do duto, imagens e medições produzidas a partir de nuvens de pontos baseadas em laser, combinadas com as imagens da câmera HD, são altamente precisas e fáceis de processar.
Um dos mercados que a Modus tem como alvo é a energia eólica offshore. Os campos da matriz de turbinas estão frequentemente em áreas de alta corrente, de modo que em 2017 a empresa testou o HAUV em uma usina hidrelétrica na Suécia, onde o veículo de 4,5kt demonstrou sua capacidade de manter a posição e manobrar com sucesso em 3kts de corrente. Em locais de vento em alto-mar, muitas vezes há embarcações de serviço de pedestres trabalhando em campo para atividades de manutenção, que são efetivamente barcos de hotel com muito tempo redundante. Desenvolvemos o HAUV para poder ser implantado e recuperado a partir desses navios essencialmente substituindo a necessidade de mobilizar uma embarcação ROV para realizar atividades de inspeção. Isso torna a embarcação de serviço mais valiosa.
Para o Modus, não se trata apenas de inspeção visual. A empresa também está testando o sistema de FIGs da Force Technology, que pode realizar pesquisas de proteção catódica sem contato em 4knts, juntamente com a pesquisa GVI.
“A Saab projetou um veículo submarino robusto e o desenvolvemos ainda mais para que possa ser operado como um veículo de inspeção e inspeção líder na classe”, diz Ward. “Nós nos concentramos em como os sensores são integrados, como eles se comunicam entre si, software de missão e agora estamos nos movendo para a inteligência artificial e capacidades de aprendizado de máquina. Nós já podemos dizer 'vá aqui, se você vir um duto, siga, ou se você ver um monopile, faça uma inspeção em torno de sua circunferência'. Tudo isso foi demonstrado em testes. O próximo conjunto de desenvolvimentos autônomos será muito emocionante. No curto prazo, queremos desenvolver o HAUV rastrear e pesquisar cabos enterrados de forma autônoma. Diversas tecnologias de rastreamento de tubulações estão sendo testadas atualmente. Espera-se que isso seja um desenvolvimento rápido, já que podemos usar algoritmos semelhantes aos usados para rastrear oleodutos visíveis. ”
Não tem sido uma jornada fácil, mas Ward vê que alguns estão vendo o potencial. “Não há dúvidas de que enfrentamos desafios para levar essa tecnologia ao mercado”, diz ele. “Primeiramente, muitas empresas querem continuar fazendo as operações do jeito que sempre fizeram, por exemplo, algumas operadoras ainda especificam ROV e câmeras de lança para inspeção de tubulações. Mas os clientes que adotaram esse HAUV, que exigem uma abordagem um pouco diferente para lidar com o GVI, colheram os benefícios em economia de custos e melhor qualidade de dados.
“O HAUV está totalmente operacional há quase um ano, tem um histórico crescente e estamos muito empolgados com as otimizações e recursos adicionais que planejamos encomendar nos próximos meses, além de dar as boas-vindas ao nosso segundo HAUV à frota daqui a alguns meses. "
Quebrando o gelo na pesquisa do Ártico

Aprofundando a análise: Desafios e tendências na indústria de dragagem

Plantando as Sementes da Inspiração: Restauração da Erva-Marinha

Da incerteza à vantagem: WHOI lança novas iniciativas para parceiros da indústria.

Projeto de vedação com anel O, Parte 2: Vedações radiais para pressão externa
")
Ampliando a frota não tripulada: de embarcações individuais a operações em nível de sistema.

Equipe de pesquisa do Schmidt Ocean Institute descobre 31 novas espécies

AUKUS desenvolverá veículos subaquáticos não tripulados (UUVs), com entrega prevista para 2027.

Vard conquista encomenda recorde de US$ 800 milhões para navio de pesquisa em águas profundas.
-171000 "RV11000 do projeto VARD 9 42 para Inkfish (Crédito: Vard)")
Ørsted e PGE instalam as primeiras fundações no parque eólico offshore Baltica 2, na Polônia.
-170484 "(Crédito: Van Oord)")
MTR100: Perfil dos Líderes Submarinos - Inscrições Abertas

As baleias-francas do Atlântico Norte registram o maior número de nascimentos nesta temporada de parição desde 2009.
 vista com seu filhote na Baía de Cape Cod em 9 de abril de 2026. CRÉDITO: Aquário da Nova Inglaterra, foto tirada sob a Permissão nº 25739-01 da NOAA.")