Robótica: a próxima geração em veículos submarinos

O conceito MUM da Thyssenkrupp. Imagem da Thyssenkrupp.

uLARS zumbido superfície da uSEA. Imagens do uSEA.
MUMs (e filhas) de invenção: ninfas do mar e MUMs estão inspirando uma nova geração de sistemas e veículos subaquáticos. Elaine Maslin dá uma olhada.
A lista de candidatos para entrar no domínio subaquático está crescendo rapidamente. Os conceitos variam, de naves-mãe autônomas submersas capazes de transportar uma série de cargas por longas distâncias até enxames de nós de fundo oceânico implantados em queda que podem encontrar seu caminho para locais pré-programados.
Em energia: conectada, como é chamado agora o conglomerado e conferência anual do Vale Subsea, alguns desses conceitos foram delineados, incluindo os de duas empresas norueguesas de tecnologia e da alemã Thyssenkrupp, uma empresa mais acostumada a projetar sistemas submarinos navais.
uSEA revela uLARS
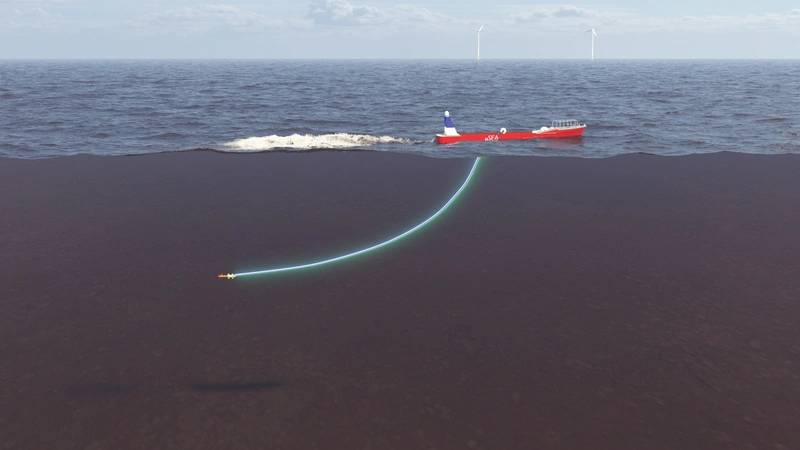
Um deles, a start-up norueguesa de tecnologia uSEA, está propondo um sistema híbrido para interromper as operações submarinas de embarcações tripuladas existentes por meio de uma combinação de drones submarinos e de superfície.
A uSEA foi fundada em 2017 e desde então vem desenvolvendo um drone de superfície, ou embarcação de superfície não tripulada (USV), para apoiar drones subaquáticos (ou seja, veículos subaquáticos autônomos ou AUVs), para que as embarcações tripuladas não sejam mais necessárias e a recarga da bateria possa ser feito na água, evitando operações de lançamento e recuperação. Isso faz com que seja diferente de outros conceitos de drones de superfície, que tendem a contar com a recuperação total do veículo de operação remota (ROV) ou AUV para recarga. O sistema da uSEA é chamado uLARS (sistema de lançamento e recuperação LARS) para drones subaquáticos, diz o CEO da uSEA Felipe Lima, que serviu na Marinha do Brasil antes de trabalhar na Subsea 7, Aker Solutions e Xodus Group.
É uma progressão natural. Os AUVs de hoje estão ficando cada vez mais capazes e confiáveis, diz Lima. “Eles estão tomando o espaço que tem sido o quintal dos ROVs. Mas eles têm uma limitação; eles dependem de baterias, porque eles não são cabeados como ROVs, e eles ainda precisam de uma nave mãe, por exemplo. um navio de pesquisa, porque suas baterias acabam em 12-48 horas. Com uma estação de acoplamento móvel para o AUV, você não depende de uma estação de ancoragem no fundo do mar e não precisa de uma embarcação de superfície maior. ”
 Interface de atracação subaquática uLARS da uSEA (Imagem: uSEA)
Interface de atracação subaquática uLARS da uSEA (Imagem: uSEA)
O sistema inclui uma cabeça de reboque submersível, com um conector indutivo para carregamento e transferência de dados, que funciona como um reabastecimento de jatos de combate no ar. "Isso significa que há um impacto mínimo das ondas porque o acoplamento está em uma profundidade controlada", diz Lima, que tem um mestrado em Engenharia Submarina da Universidade de Aberdeen e um mestrado em Inovação e Empreendedorismo da Universidade de Oslo. Há também um sistema de manipulação baseado na piscina através da lua para recuperar o AUV no convés, com segurança.
O sistema suportará pesquisa submarina em águas rasas, bem como em águas profundas e ultraprofundas, operando uma ampla variedade de cargas úteis, desde tipos mais convencionais, como sonares de varredura lateral e sonda de multibeam até sistemas mais avançados, como sonares de abertura sintética.
A uSEA está procurando parceiros para concluir o programa de qualificação, que é esperado até o final do próximo ano (2020). Depois disso, a empresa tem como alvo as operações no mar e está procurando projetos pilotos para realizar em 2021.
Um iDROP no oceano
Outra empresa de tecnologia norueguesa, a iDROP, planeja interromper o mercado de tecnologia sísmica no fundo do mar com seus nós autônomos da Oceanid. O sistema da iDROP é baseado em nós sensoriais cilíndricos individuais (nomeados após ninfas marinhas gregas) que são largados, usando gravidade e mudança de lastro para propulsão e controle de posição, para pousar em posições pré-planejadas específicas no leito marinho onde pousam em pernas de alumínio. Saia antes que eles caiam.
 Um Oceanid da iDROP. Na mitologia grega, os Oceanids são ninfas que eram as 3000 filhas dos Titans Oceanus e Tethys. (Imagem: iDROP)
Um Oceanid da iDROP. Na mitologia grega, os Oceanids são ninfas que eram as 3000 filhas dos Titans Oceanus e Tethys. (Imagem: iDROP)
A ideia é que eles possam ser implantados em grupos, caindo para formar padrões de grade no fundo do mar para levantamentos sísmicos. Baterias a bordo alimentam o controle de descida (usando apenas 5% da bateria), coleta de dados (por 180 dias) e acionam um mecanismo que libera o lastro de 30 kg - feito de polpa de sal - permitindo que as unidades deslizem de volta à superfície novamente, sob controle, de modo que eles apontem para um alvo esperado. Um sistema de superfície com um arranjo tipo correia transportadora flutuante os coletaria “Há uma variedade de tecnologias de aquisição sísmica que são principalmente rebocadas”, diz Kyrre J Tjøm, fundador e CEO da iDrop, que trabalhou anteriormente na Schlumberger e consultou Equinor e Seabed Geo Solutions. “Existem também nós que são colocados no fundo do mar por um ROV. Existem outros onde você os joga de lado com lastro de concreto e algumas alternativas de propulsão. Nosso sistema eliminará a necessidade de grandes embarcações especializadas com máquinas de manuseio pesado e operações ROV demoradas ”.
Grupos de Oceanídeos podem ser implantados rapidamente e a granularidade do ponto do sensor (ou seja, a cobertura da área e, portanto, a quantidade de dados a serem recuperados) pode ser aumentada, diz ele. Isto é graças a 69 graus para a capacidade de deslocamento lateral autônomo vertical, com cada nó “caindo” para uma posição pré-definida. “Se você quiser implantar um sensor em uma profundidade de água de 1200 m, você pode chegar a 2 km de distância da embarcação de superfície e instalar um patch de sensores, em vez de uma linha”, diz ele.
Lotes de nove nós, cada um com um modem indutivo, transponder e carga útil do sensor sísmico, poderiam ser utilizados em 15 minutos, uma economia de tempo de 10 vezes em comparação com os métodos estabelecidos, diz Tjøm. Um gêmeo digital, baseado em modelagem e testes estendidos, seria usado para ajudar a identificar qualquer impacto ambiental, por exemplo. ondas, corrente, profundidade, etc. e, portanto, permitem o controle da descida.
"Estamos olhando para revolucionar a forma como os nós do fundo do oceano estão instalados no fundo do mar", diz Tjøm. “Os competidores fazem 40-170 por dia e precisam de dois ROVs, sistemas de manipulação de nós controlados por DP, um grande navio e tripulação especializada. Quanto mais fundo você vai, os ROVs são mais lentos, pois precisam de mais força para puxar o umbilical. Fizemos apenas menos de 1000 por dia com uma tripulação marítima padrão ”.
Muito trabalho foi colocado no projeto da Oceanids nos bastidores e é só agora que a tecnologia está sendo promovida. De fato, o projeto começou em 2010, com um protótipo construído em 2013/14. A iDROP também construiu um sistema de recuperação e realizou um teste costeiro para verificar o sistema de recuperação. Um segundo teste piloto, adquirindo dados sísmicos 3D, em águas profundas, está previsto para este ano no Mar do Norte. Nove veículos foram construídos e deveriam ser testados no primeiro semestre, com mais planejados para serem construídos no próximo ano.
MUM é a palavra
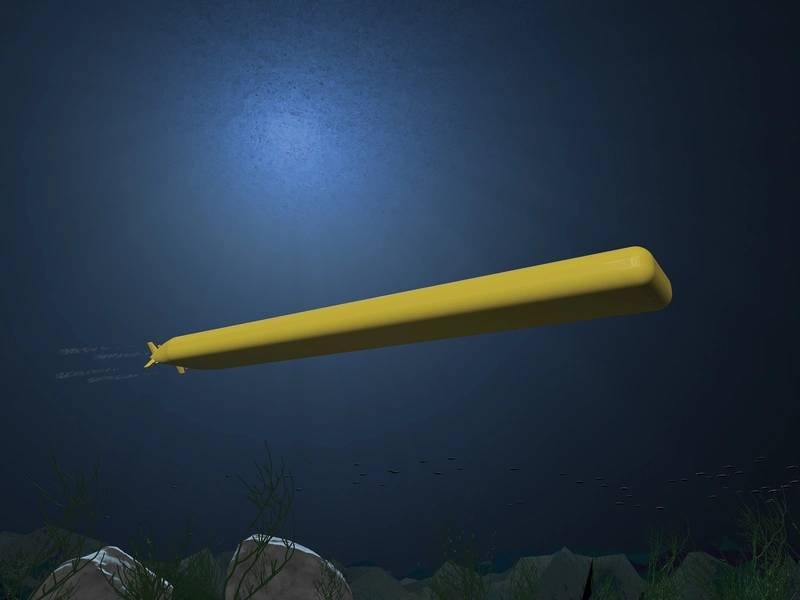
A Thyssenkrupp Marine Systems (MS), parte do conglomerado industrial alemão, está trabalhando em uma escala diferente para a uSEA e a uLARS. A empresa está projetando um veículo submarino não tripulado (UUV) muito grande (até 50 metros de comprimento), chamado de nave-mãe subaquática modificável (MUM), baseado em um projeto modular, compreendendo módulos básicos e de missão.
O pensamento por trás disso é que o mercado de veículos subaquáticos submarinos de hoje é dominado por produtos especializados, com nenhum veículo capaz de ser usado para múltiplas tarefas. Então, a Thyssenkrupp começou a projetar um sistema modular, diz Willem Hendrik Wehner, que supervisiona o projeto na Thyssenkrupp MS.
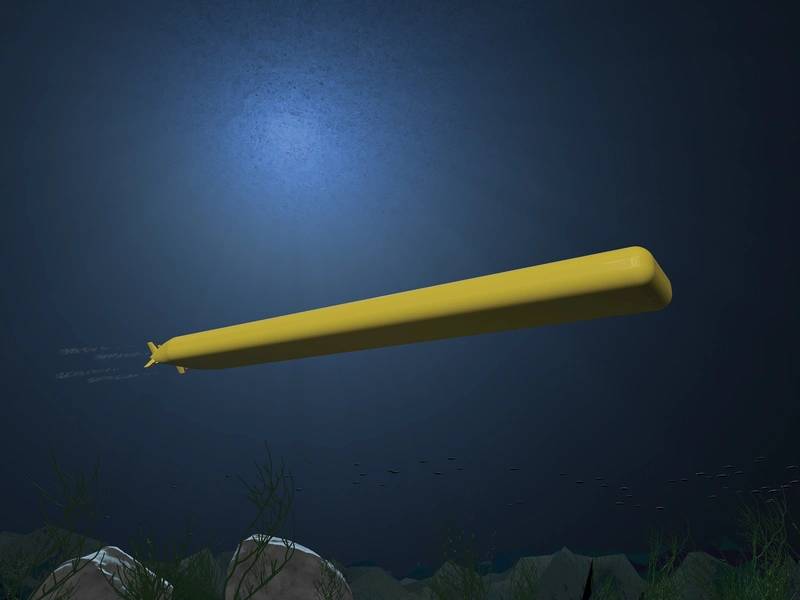 O conceito MUM da Thyssenkrupp (Imagem: Thyssenkrupp)
O conceito MUM da Thyssenkrupp (Imagem: Thyssenkrupp)
Os módulos básicos seriam sistemas de compensação e mergulho, bateria, propulsão e uma célula de combustível de hidrogênio. Então, os módulos focados na missão podem variar desde a implantação de Núcleo Sísmico (OBN) no fundo oceânico (> 1000 OBNs) até sistemas de perfuração de núcleo, ou de módulo de controle submarino para veículos remotamente operados, que usariam o grande UUV como navio-mãe. Um kit modular MUM consistiria em módulos que têm o tamanho de contêineres padrão de 20 ou 10 pés. Eles podem ser combinados de acordo com as especificações da missão, resultando em veículos bastante diferentes, de 80 toneladas métricas para acima de 300 toneladas métricas, ou de 20m de comprimento, 4m de largura e 3m de altura até cerca de 50m de comprimento, 7m de largura e 3m de largura. alta, com consumo de energia dependente da carga útil e da velocidade de propulsão.
“Outros veículos submarinos têm abordagens modulares, mas principalmente em termos de adaptação da seção de carga útil ou de estender a resistência, adicionando mais capacidade de energia”, diz Wehner. “Um bom exemplo é o SeaCat AUV da ATLAS, que pode mudar sua carga trocando a cabeça do veículo e pode estender o alcance adicionando mais capacidade de bateria.”
Wehner diz que o veículo MUM seria capaz de percorrer centenas de quilômetros, dependendo da configuração do veículo, com sua potência de célula de combustível de hidrogênio de 80-160kW, e até milhares de metros de profundidade de água. “O alcance subaquático é escalável e na região dos 100s de milhas náuticas; completamente suficiente para os casos de uso atuais ”, diz ele. “Nosso sistema de armazenamento de gás para a célula de combustível é cerca de três vezes superior às baterias em relação à energia por volume e ainda mais em relação ao peso. No entanto, se você quiser cobrir mais de 1.000 milhas náuticas, recomendamos um trânsito próximo à superfície com uma abordagem mais convencional, por exemplo, diesel-elétrico. O conceito permite isso. ”
As células de combustível de hidrogênio são uma tecnologia comprovada independente do ar para os submarinos da Thyssenkrupp; a empresa possui uma profunda experiência com células a combustível de hidrogênio no submarino alemão HDW Classe 212A, além de outros submarinos. As baterias podem ser necessárias para cargas de pico de algumas cargas úteis, mas a maioria dos projetos atuais de veículos MUM tem apenas uma bateria de backup / emergência de pequeno porte, diz Thyssenkrupp. Um módulo para trânsito de superfície ou próximo à superfície está sendo projetado no momento, já que o sistema de célula de combustível tem suas forças para suportar tarefas subaquáticas.
Para comunicações de longo alcance, em missões longas, a Thyssenkrupp MS está procurando usar modems autopropulsados, ou nós de comunicação autônomos, com capacidade de transmissão de dados bidirecional, para criar comunicações acústicas de longo alcance através de uma cadeia desses nós, bem como navegação local ou posicionamento 3D através de modems USBL. Estes estão sendo desenvolvidos sob um subprojeto chamado NaviMUM da EvoLogics e seriam implantados a partir de uma revista de revólver no MUM.
A EvoLogics chama o conceito de rede submarina móvel auto-organizada, com os nós formando estações de retransmissão, além de fornecer posicionamento. Eles se espalham autonomamente em uma área de missão, analisam o ambiente de comunicação, depois mantêm a posição e interconectam-se para formar uma rede subaquática flexível. Alguns teriam um receptor GNSS, para obter ajustes periódicos da posição real, diz Wehner.
“Veículos muito grandes, como o MUM em particular, precisam de sensores e algoritmos fortes para evitar obstáculos autônomos e replanejar a pista”, diz Thyssenkrupp. “Algoritmos de controle auto-ajustáveis que refletem a grande variedade de configurações de veículo possíveis apoiarão o conceito do veículo. O projeto desenvolve um sistema de comunicação e navegação móvel com modems LBL / USBL autopropulsados que podem estabelecer uma rede e atracar no veículo MUM para trânsito e carregamento. ”
A Thyssenkrupp MS está construindo uma versão em pequena escala do MUM, com 5m de comprimento, que estará pronta para testes neste verão (2019). Muitos dos conceitos, em particular o software de autonomia e as comunicações móveis, serão testados neste sistema. As principais tecnologias, como a nova célula de combustível de hidrogênio, bem como um novo projeto de casco de pressão também serão testadas, em tamanho real, este ano.
Um veículo MUM em escala real deve ser construído no teste a partir de 2020, com testes e testes até 2023-24. O desenvolvimento está sendo apoiado por um painel consultivo da indústria de petróleo e gás, incluindo a operadora Equinor, a empresa sísmica PGS e a empreiteira submarina Boskalis.
A empresa também tem ATLAS ELEKTRONIK, a Universidade Técnica de Berlim e a Universidade de Rostock trabalhando no projeto, no sistema de controle e na simulação do sistema, respectivamente.
MTR100: Perfil dos Líderes Submarinos - Inscrições Abertas

As baleias-francas do Atlântico Norte registram o maior número de nascimentos nesta temporada de parição desde 2009.
 vista com seu filhote na Baía de Cape Cod em 9 de abril de 2026. CRÉDITO: Aquário da Nova Inglaterra, foto tirada sob a Permissão nº 25739-01 da NOAA.")
Projeto SURFREEF da Lineup Ocean em Palavas-les-Flots

Uma lufada de ar fresco: veículos subaquáticos mapeiam a hipóxia no Golfo.

Segurança de porta integrada e multidomínio
-Aero-169807 "O veículo autônomo subaquático e de superfície (AUSV) Triton, da Ocean Aero, foi adquirido pelo Porto de Gulfport no ano passado. Crédito: Ocean Aero")
MTR100: Perfil dos Líderes Submarinos - Candidate-se hoje!

Lamprell garante acordo com a ONGC para projeto de substituição de gasoduto submarino

A acoplagem automática como tecnologia habilitadora da autonomia operacional de sistemas subaquáticos

Uma Perspectiva Brilhante: Lasers Azuis para as Profundezas do Mar

Alimentando as fronteiras mais profundas: Escolhendo baterias de lítio para veículos submarinos extremos.

A Oceanology International 2026 traz para a costa o novo foco COAST.

Expectativas crescentes: Uma análise aprofundada dos veículos subaquáticos
