Seleção de motores elétricos para veículos subaquáticos: considerações sobre eficiência de carga parcial
É fácil entender por que os motores síncronos de ímã permanente (PMSMs) são populares para uso em veículos subaquáticos (UVs). Eles são compactos e eficientes com uma alta densidade de potência. Mais importante, talvez, eles permitem uma operação eficaz em uma ampla faixa de RPM, o que é benéfico para veículos com várias condições de operação. Dito isso, descobrimos que os desenvolvedores de produtos de veículos geralmente não têm certeza sobre a “eficiência” de um motor. Este artigo oferece alguns comentários da perspectiva de um projetista de hélices, desenvolvendo os componentes que colocam a carga no motor de um UV.
Primeiro devemos começar com uma descrição do “sistema”, que é composto pelo Veículo (que estabelece o requisito de empuxo), um Propulsor (normalmente uma hélice aberta ou canalizada que cria o empuxo necessário) e o Drive (aquele motor principal cujo único trabalho é girar o propulsor em seu RPM necessário). Se agruparmos o sistema em uma unidade conceitual, o benefício do sistema é a velocidade do veículo (ou empuxo, no caso de uma aplicação de reboque) enquanto o custo do sistema é o “consumo de combustível”. Para sistemas acionados por motores de combustão interna, o custo é o consumo de óleo combustível, digamos, em unidades de litros por hora. Os fabricantes de motores geralmente fornecem informações suficientes sobre o consumo de combustível em toda a faixa de rotação e potência do motor para que possamos prever com segurança o uso de combustível para qualquer aplicação. Um gráfico dessa distribuição costuma ser chamado de “mapa de combustível”, mas deixe-me pensar nisso como um “mapa de eficiência” de energia de saída para entrada.
Infelizmente, temos uma circunstância completamente diferente ao usar unidades PMSM. A confusão pode surgir porque o benefício gerado pelo motor e o combustível usado pelo motor compartilham o termo “potência” – sendo um a potência mecânica de saída do eixo (que aciona o propulsor) e o outro a potência elétrica de entrada (uma função da tensão e corrente fornecida pelo controlador). A relação entre os dois é a “eficiência do motor”. Conhecer a eficiência correta do motor em todas as RPMs e cargas é fundamental para o sucesso do projeto e da análise do sistema. Embora a maioria dos testes de desenvolvedor registre a energia elétrica, precisamos saber a potência do eixo para entender o desempenho geral do sistema.
Embora a curva do motor publicada pelo fabricante indique o limite de torque (e, portanto, potência) em toda a faixa de RPM, eles frequentemente indicam apenas a eficiência mecânica para elétrica em um único ponto de projeto ou no limite de torque. Ao contrário do que está disponível nos fornecedores de motores, raramente temos um “mapa de eficiência” de potência mecânica para elétrica em toda a faixa útil de carga de RPM e potência de eixo para PMSMs. Para obter esses dados, alguns de nossos clientes têm seus motores testados em pequenos dinamômetros para gerar um mapa de eficiência. No entanto, isso pode ser caro e demorado - e um exercício potencialmente desperdiçado durante o projeto em estágio inicial, onde há dúvidas se o motor será selecionado.
Quais são as fontes de perda de eficiência para PMSMs? A explicação é uma mistura complicada de termos como resistência do enrolamento, fricção mecânica e até efeitos de fluxo magnético. Portanto, vamos simplificar um pouco com algumas generalizações usando termos gerais de: potência do eixo de carga mecânica (PS), eficiência (EFF), RPM e perdas de energia (LOSS).
• A eficiência do motor é definida como EFF = PS / (PS+LOSS).
• Para simplificar, podemos dizer que as perdas são de dois tipos: dependentes da carga de potência ou dependentes do RPM.
• As perdas (não a eficiência, mas as perdas) tendem a ser proporcionais a) ao RPM eb) ao quadrado da potência.
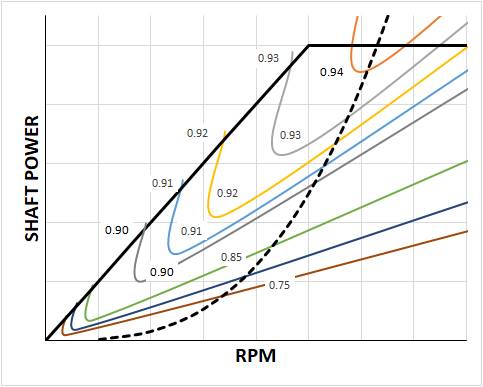
Um mapa de eficiência representativo genérico é mostrado nos gráficos abaixo para um PMSM de “torque constante, potência constante”. É nossa prática sempre converter um gráfico “baseado em torque” em um “baseado em potência”, pois sentimos que a potência é a melhor maneira de comunicar a geração e transmissão de energia para veículos e propulsores. A linha preta sólida representa a curva limite do motor, a linha tracejada é uma curva de demanda genérica do propulsor e as linhas coloridas são figuras de mapa de eficiência de amostra.
A partir deste gráfico, podemos ver como operar em carga parcial influencia a eficiência do motor. Há uma ampla faixa de RPM que mantém alta eficiência, já que quase metade da faixa superior de RPM está dentro de alguns por cento da eficiência máxima do motor - desde que o motor esteja gerando 80% ou mais de sua potência nominal. Em termos de operação do veículo, em velocidade máxima, a eficiência é máxima, chegando a 95%. A uma velocidade de 75%, a demanda de energia é de 40% a 45% e a eficiência cai para 85% a 90%. A 50% da velocidade, pouca energia é necessária e a eficiência do motor pode cair para menos de 75%.
(Lembre-se, estes são valores genéricos usados aqui para representar um conceito. As eficiências reais variam de modelo para modelo.)
Então, deixe-me fazer algumas observações básicas:
• A eficiência potencial máxima de um PMSM varia com o tamanho do motor – com motores de maior potência oferecendo potencial para eficiências mais altas. Por exemplo, um PMSM de 20 kW pode ter eficiência máxima do motor superior a 95% em carga total, enquanto um motor com menos de 1 kW normalmente atinge apenas 90%.
• Conforme observado acima, embora a eficiência varie com o RPM, deve haver uma faixa razoavelmente ampla de RPM que mantenha a alta eficiência para a maioria das aplicações que requerem carga total ou quase total.
• A carga parcial de energia é o grande problema para a maioria das aplicações, pois operar um motor em baixa potência pode causar uma queda significativa na eficiência do motor. Por exemplo, a eficiência do motor pode cair para menos de 70% para potência de eixo fracionada.
Motores elétricos – particularmente PMSMs – são um foco importante de nosso trabalho de desenvolvimento para o NavCad em 2020. Estamos trabalhando para simplificar a definição desses acionamentos no NavCad com energia elétrica como o “combustível” e formas genéricas de curva do motor (como “constante- torque, potência constante”) para projeto em estágio inicial. E, é claro, estamos profundamente envolvidos em um modelo de previsão para mapas de eficiência de carga parcial fora do projeto!
Leia esta história na edição de março de 2020 do Marine Technology Reporter: https://magazines.marinelink.com/nwm/MarineTechnology/202003/#page/20
MBARI nomeia Antje Boetius presidente e CEO
-153968 "Antje Boetius (Foto: MBARI)")
Cingapura aumenta o poder submarino com dois novos submarinos
-153498 "(Foto: MINDEF Singapura)")
Governo da Holanda ajuda a impulsionar cluster regional de tecnologia marítima, offshore e submarina
![“Nossa província foi moldada pelo Oceano Atlântico. Ele pode ser extremamente frio, extremamente implacável. Se funciona aqui, funcionará em qualquer lugar. A tecnologia que [desenvolvemos e] usamos aqui pode ser adaptada para qualquer outro lugar do mundo. Somos adaptáveis, somos ágeis, somos solucionadores de problemas. E no final do dia, somos colaborativos." Ministro Andrew Parsons, Indústria, Energia e Tecnologia, Newfoundland & Labrador, Canadá. Foto cortesia do gabinete do Ministro Andrew Parsons](http://images.marinetechnologynews.com/images/maritime/w400h400/“Nossa-província-foi-moldada-pelo-Oceano-Atlântico-153427 "“Nossa província foi moldada pelo Oceano Atlântico. Ele pode ser extremamente frio, extremamente implacável. Se funciona aqui, funcionará em qualquer lugar. A tecnologia que [desenvolvemos e] usamos aqui pode ser adaptada para qualquer outro lugar do mundo. Somos adaptáveis, somos ágeis, somos solucionadores de problemas. E no final do dia, somos colaborativos.\" Ministro Andrew Parsons, Indústria, Energia e Tecnologia, Newfoundland & Labrador, Canadá. Foto cortesia do gabinete do Ministro Andrew Parsons")
Greensea IQ faz parceria com WHOI para promover tecnologias de pesquisa oceânica
")
Editorial: Por dentro do poder de Newfoundland & Labrador

Chipre apoia ligação de cabo elétrico submarino "Great Sea Interconnector" de vários bilhões de dólares
-153249 "(Foto de arquivo: Nexans)")
Exail ganha contrato de € 60 milhões da OTAN para veículos de eliminação de minas subaquáticas

Austrália realiza primeira manutenção de submarino nuclear dos EUA
 se prepara para atracar no HMAS Stirling, Austrália Ocidental, Austrália, como parte de uma visita programada ao porto antes de realizar um período de manutenção de submarinos (STMP) com o submarino USS Emory S. Land (AS 39), 22 de agosto. (Foto: Victoria Mejicanos / Marinha dos EUA)")
-152440 "Martin Klein (cortesia de Martin Klein e do Museu do MIT)")


")